
Đồng bộ hóa bản đồ và ánh xạ (SLAM)
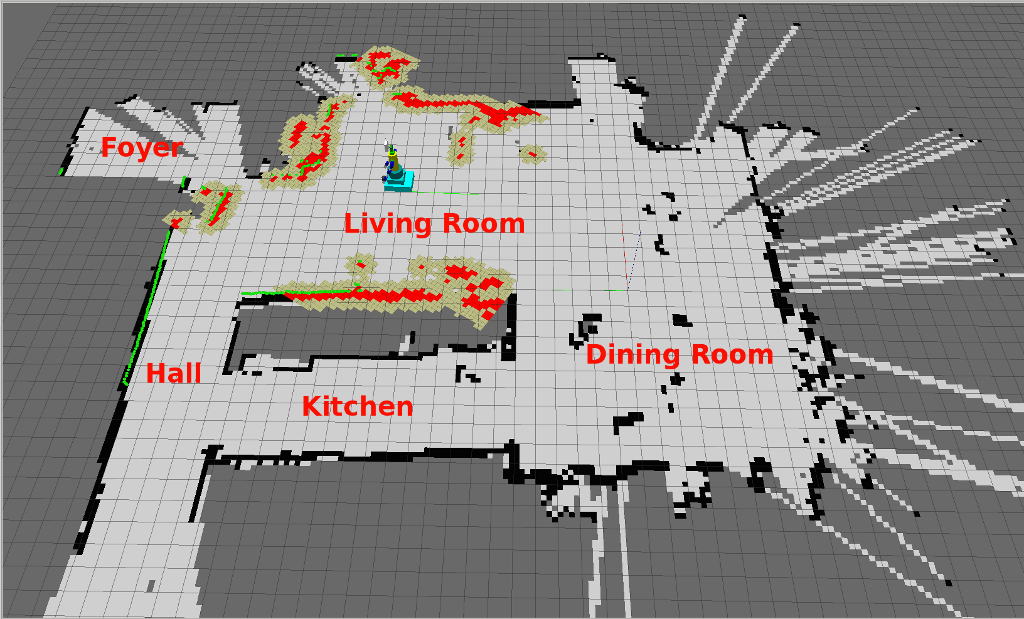
Bản đồ hóa và bản đồ hóa đồng thời , còn được gọi là SLAM, là quá trình thu thập dữ liệu từ thế giới thực, với sự trợ giúp của nhiều cảm biến được cài đặt trong rô-bốt. Sau đó, dữ liệu này được tạo thành bản đồ để điều hướng sau này. SLAM giúp robot tự bản địa hóa, diễn giải dễ dàng hơn